|
I am a graduate student in the SPARK Lab of MIT LIDS. I am extremely fortunate to be advised by Prof. Luca Carlone. Prior to MIT, I was a MS-Research student in the CMU Robotics Institute studying Artificial Intelligence and Robotics, advised by Prof. David Held. I also worked at Amazon as an Applied Scientist II. Prior to CMU, I earned my B.S. (2017-2021) with Honors from UC Berkeley with a major in EECS and a minor in Mechanical Engineering. During my time at Berkeley, I did research under Prof. Ken Goldberg and Dr. Jeffrey Ichnowski in AUTOLab. I maintain and curate a popular deep reinforcement learning tutorial on my Github. Outside of school, I do quantitative finance. |

|
|
In reverse chronological order:
|
|
My current research focuses on trustworthy AI and autonomous systems. Specifically, I design algorithms for machines to learn representations for more robust real-world generalization and better certifiability. My research revolves around the theme of learning-based perception systems and robotic systems. |
|
|
|
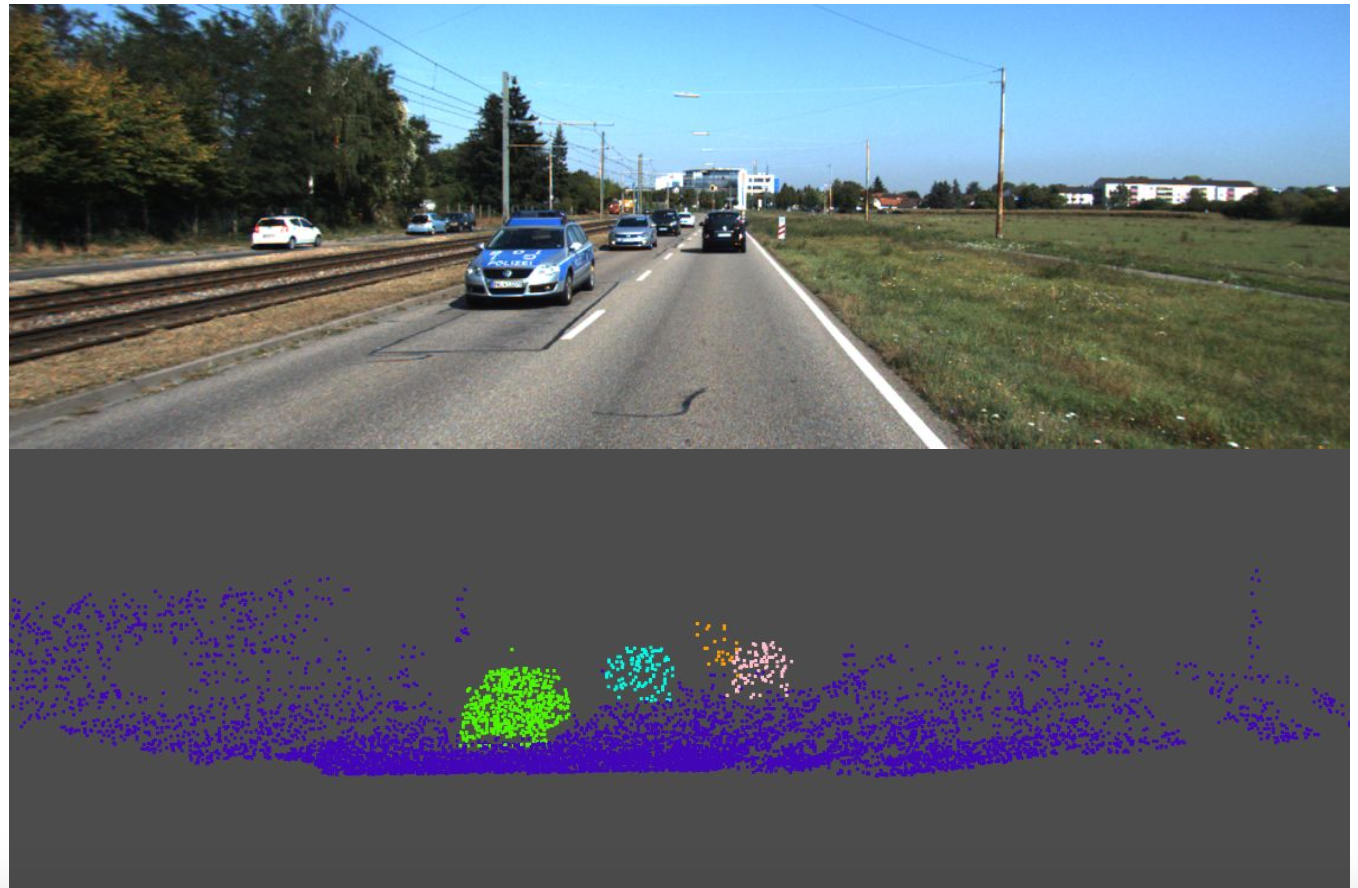
David Jin, Sushrut Karmalkar, Harry Zhang, Luca Carlone Accepted to IEEE International Conference on Robotics and Automation (ICRA), 2024. Arxiv | Code | Video We investigate a variation of the 3D registration problem, named multi-model 3D registration. In the multi-model registration problem, we are given two point clouds picturing a set of objects at different poses (and possibly including points belonging to the background) and we want to simultaneously reconstruct how all objects moved between the two point clouds. |

|
Sitian Shen, Zilin Zhu, Linqian Fan, Harry Zhang, Xinxiao Wu Accepted to IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2024. Arxiv | Code | Video We propose DiffCLIP, a new pre-training framework that incorporates stable diffusion with ControlNet to minimize the domain gap in the visual branch. Additionally, a style-prompt generation module is introduced for few-shot tasks in the textual branch. |
|
Harry Zhang, Benjamin Eisner, David Held Accepted to Conference on Robot Learning (CoRL), 2023. Arxiv | Code | Video | Open Review We explore yet another novel method to perceive and manipulate 3D articulated objects that generalizes to enable the robot to articulate unseen classes of objects. |
|
Brian Okorn*, Chu Er Pan*, Harry Zhang*, Benjamin Eisner*, David Held Accepted to Conference on Robot Learning (CoRL), 2022 (* indicates equal contribution) Arxiv | Code | Video | Open Review We conjecture that the task-specific pose relationship between relevant parts of interacting objects is a generalizable notion of a manipulation task that can transfer to new objects. We call this task-specific pose relationship "cross-pose". We propose a vision-based system that learns to estimate the cross-pose between two objects for a given manipulation task. |
|
Benjamin Eisner*, Harry Zhang*, David Held Accepted to Robotics Science and Systems (RSS), 2022 (* indicates equal contribution) - Long talk, Best Paper Award Finalist (Selection Rate 1.5%). Arxiv | Code | Video | Berkeley CPAR Talk | MIT Technology Review China | Synced Review Sohu | CMU Research Highlights We explore a novel method to perceive and manipulate 3D articulated objects that generalizes to enable the robot to articulate unseen classes of objects. |
|
Yahav Avigal*, Vishal Satish*, Harry Zhang, Huang Huang, Michael Danielczuk, Jeffrey Ichnowski, Ken Goldberg Accepted to Conference on Automation Science and Engineering (CASE), 2021. Arxiv | Code | Video We present present AVPLUG: Approach Vector PLanning for Unicontact Grasping: an algorithm for efficiently finding the approach vector using an efficient oct-tree occupancy model and Minkowski sum computation to maximize information gain. |
|
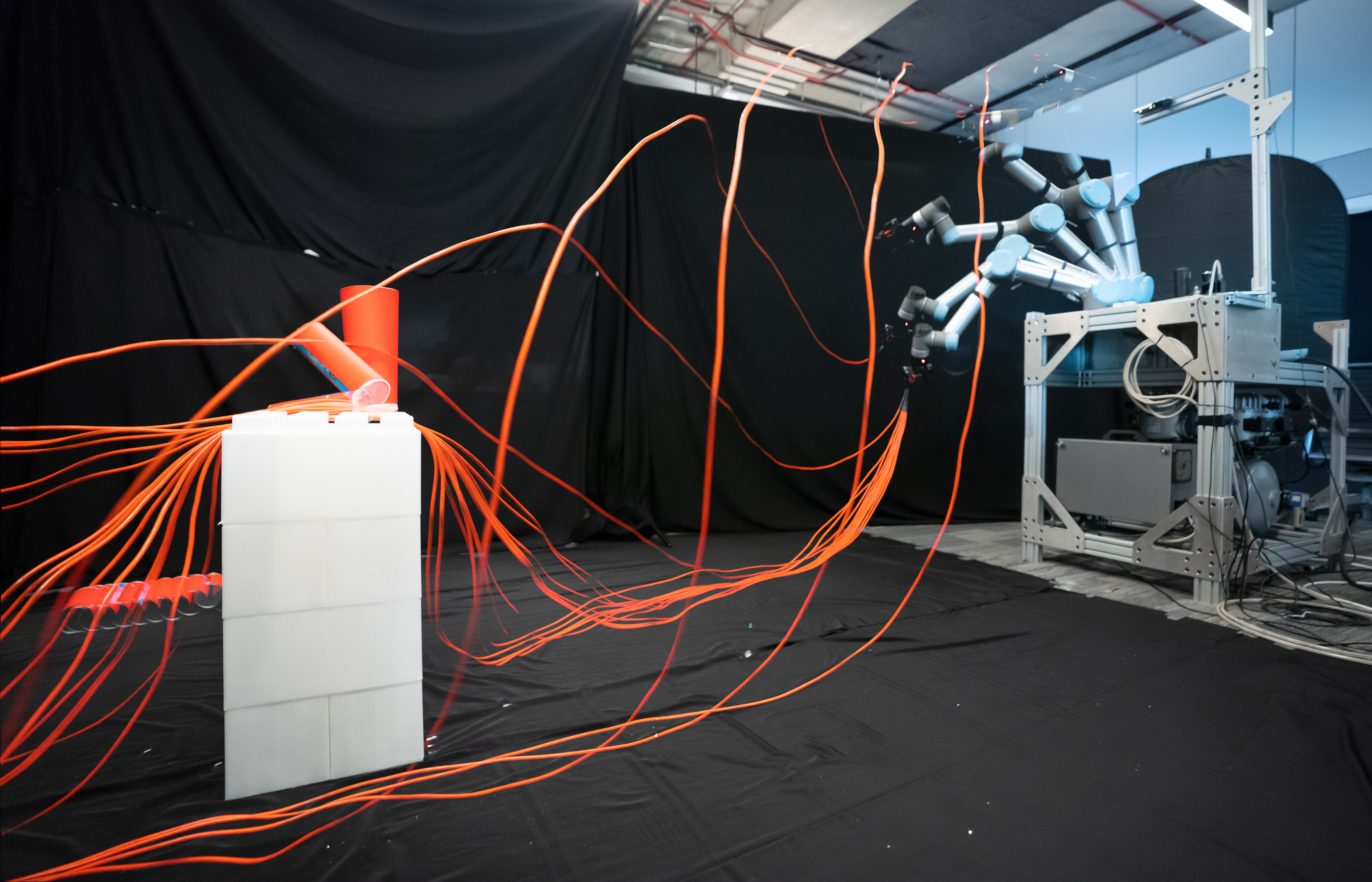
Harry Zhang, Jeffrey Ichnowski, Daniel Seita, Jonathan Wang, Huang Huang, Ken Goldberg Accepted to International Conference on Robotics and Automation (ICRA), 2021 Arxiv | Code | Bay Area Robotics Symposium Coverage | ICRA 2022 Deformable Object Manipulation Workshop We propose a self-supervised learning framework that enables a UR5 robot to perform these three tasks. The framework finds a 3D apex point for the robot arm, which, together with a task-specific trajectory function, defines an arcing motion that dynamically manipulates the cable to perform tasks with varying obstacle and target locations. |
|
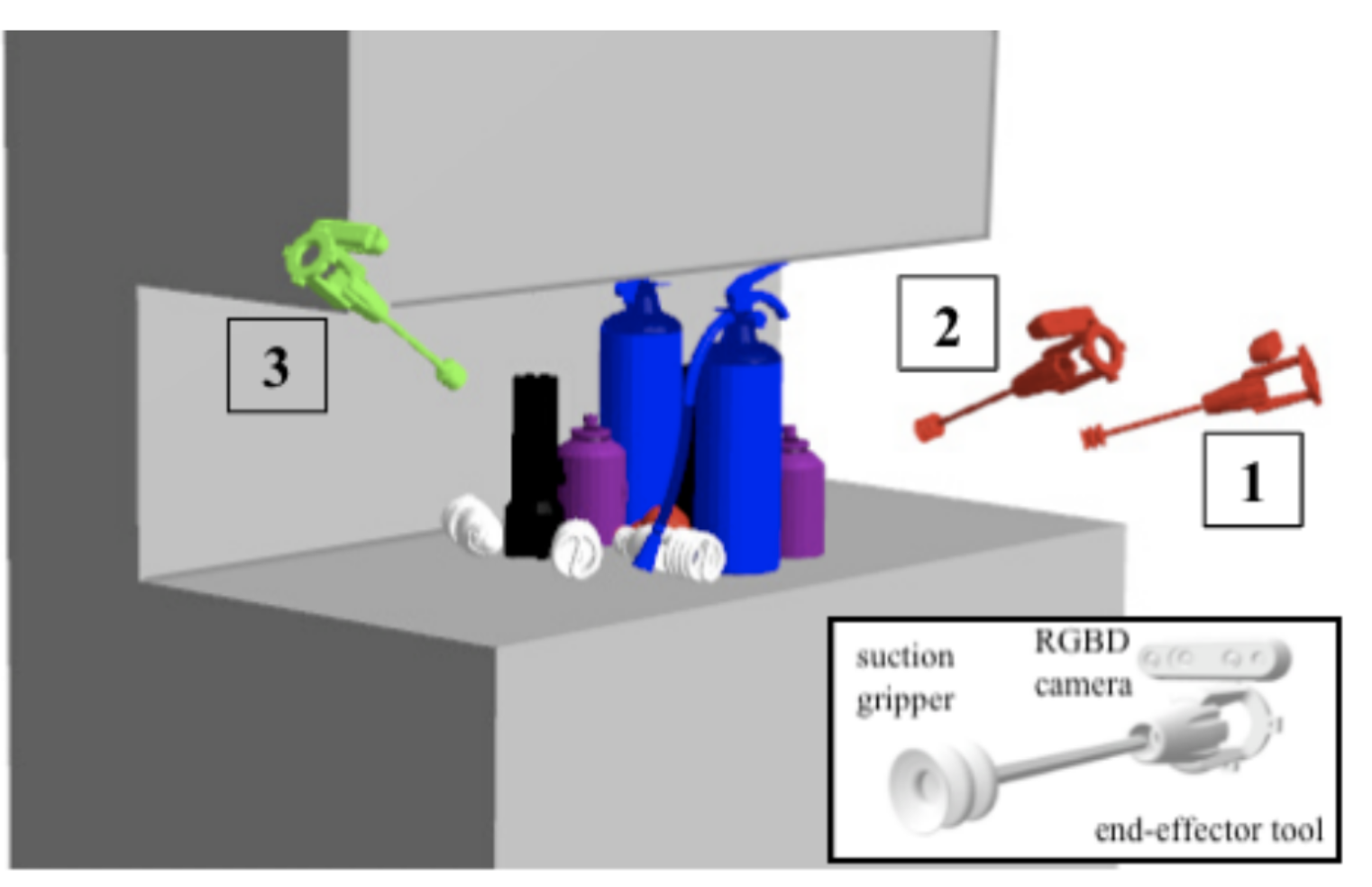
Harry Zhang, Jeffrey Ichnowski, Yahav Avigal, Joseph Gonzalez, Ion Stoica, Ken Goldberg Accepted to International Conference on Robotics and Automation (ICRA), 2020 Arxiv | Code | Video | VentureBeat Coverage | Sohu Coverage (in Mandarin) We present a distributed pipeline, Dex-Net AR, that allows point clouds to be uploaded to a server in our lab, cleaned, and evaluated by Dex-Net grasp planner to generate a grasp axis that is returned and displayed as an overlay on the object. |
|
Shivin Devgon, Jeffrey Ichnowski, Ashwin Balakrishna, Harry Zhang, Ken Goldberg Accepted to Conference on Automation Science and Enigeering (CASE), 2020. Arxiv | Code | Video We present an algorithm to orient novel objects given a depth image of the object in its current and desired orientation. |
|
|
|
Jonathan Wang*, Huang Huang*, Vincent Lim, Harry Zhang, Jeffrey Ichnowski, Daniel Seita, Yunliang Chen, Ken Goldberg Preprint, in submission to International Conference on Robotics and Automation (ICRA), 2022. Arxiv | Code | Video We present an algorithm to train a robot to control free-end cables in a self-supervised fashion. |
|
Bobby Yan*, Harry Zhang*, Huang Huang*, Preprint, 2022. Arxiv | Code | Video We introduce andexplore a novel method for adding safety constraints for model-based RL during training and policy learning. |
|
|

|
10-725: Graduate Convex Optimization |

|
CS 189: Introduction to Machine Learning
EE 127: Introduction to Convex Optimization CS 170: Algorithms ME C231A: Model Predictive Control |
|
|
